This is (the last) part of my series about symmetry in origami.
A tessellation is a set of tiles that fill up a 2D plane. And I do mean the entire 2D plane, infinite in extent. When we talk about origami tessellations, these are models that could hypothetically fill a 2D plane, if we had an infinite amount of paper. In practice, an origami tessellation is finite, but for the purposes of discussing symmetry, we will imagine them to be infinite.

An example of an origami tessellation, the Rectangular Woven Design by David Huffman
Previously, I only discussed two kinds of symmetry transformations: rotation, and reflection. However, many tessellations have repeating patterns, and this in itself is another form of symmetry. Are there other kinds of symmetries that we forgot? Let’s take an inventory of all the possible kinds of symmetry transformations.
An inventory of symmetry transformations
The Identity Transformation
This is the most basic kind of transformation, the kind that does absolutely nothing. Not too exciting, but it still counts.
Rotation, Reflection, and Translation
These are the three basic kinds of transformations. To rotate an object, you choose an axis (or in 2D, a point), and rotate around that axis. To reflect an object, you choose a plane (or in 2D, a line), and reflect about that plane. To translate an object, you choose a vector, and move the object by that amount.

Transformations as applied to the letter F. The gray F represents the initial location, and the black F represents its final location.
Glide Reflection, Rotoreflection, and Screw Transformation
Next, we can think about how to combine the three basic transformations. This is more difficult than it first appears, because often the result of two basic transformations will just be another basic transformation. You might have noticed that when I rotated the F, the center of the F moved, because there’s no reason I have to rotate the F around its own center, I can rotate it around any axis. So if you try a rotation followed by a translation, what you get is just another rotation around a different axis.
Nonetheless, there are some unique transformations that you can get by combining the basic transformations. We have glide reflection, which reflects an object about a plane, and then translates it by a vector parallel to the plane. We have rotoreflection, which reflects an object about a plane, and then rotates it around an axis perpendicular to the plane. And finally, we have the screw transformation, which rotates an object around an axis, and translates it by a vector parallel to that axis. (All these transformations have multiple names, but these are the names I’m going with.)
These translations can be hard to represent in 2D, so I took photos of a 3D object, a flip-flop.
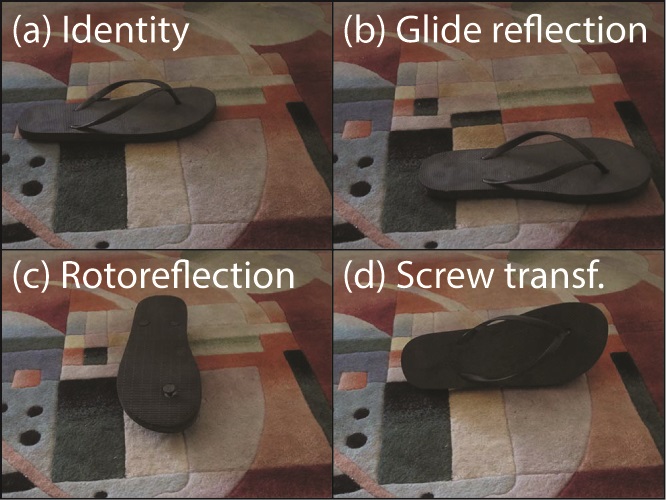
(a) shows the flip-flop before applying any transformation. (b) shows the flip-flop translated to the right, and reflected across a vertical plane. (c) shows the flip-flop reflected across a horizontal plane, and also rotated about a vertical axis. (d) shows the flip-flop translated to the right, and rotated about an axis that is parallel to the translation. Note that (a) and (d) show right-footed flip-flops, while (b) and (c) show left-footed flip-flops.
Inversion
There’s one last type of transformation: inversion. This is when you reflect an object about a point instead of a plane. Really, inversion is just a special kind of rotoreflection, where the rotation is exactly 180 degrees. But along the same lines, you could say that the identity transformation is just a special kind of rotation, where you rotate by exactly 0 degrees. Let’s just say that inversion is special, and deserves to be put in a separate category.
Symmetry transformations for tessellations
Previously in this series, I was always talking about symmetries of finite objects. Thus, we didn’t allow any symmetry transformations which would move the center of the object. Rotations and reflections are okay, as long as you rotate/reflect about axes/planes that intersect with the center of the object. Rotoreflection and inversion were allowed too. But there was no translation, no screw transformation, and no glide reflection.
Origami tessellations are (theoretically) infinite, and therefore have no well-defined center. This permits more kinds of symmetries, including translation symmetry. However, there are still constraints. A tessellation is infinite in extent, but only in 2 dimensions. Thus, translation is allowed only within those 2 dimensions. At the same time, tessellations are 3-dimensional objects! The front and back of the tessellation could be distinct. So what kind of symmetry translations are permitted?
In this list, I use “horizontal” to indicate something parallel to the plane of the tessellation, and “vertical” to indicate something perpendicular:
- Identity
- Rotation around a vertical axis
- 180 degree rotation around a horizontal axis
- Reflection about the horizontal plane (front-back reflection)
- Reflection about a vertical plane
- Horizontal translation
- Glide reflection that translates horizontally, and reflects front to back
- Glide reflection that translates horizontally, and reflects across vertical plane that is parallel to the translation
- Rotoreflection that rotates around a vertical axis, and reflects front to back
- Screw transformation that translates horizontally, and rotates 180 degrees around an axis parallel to the translation
- Inversion
There’s also another difference between origami tessellations and finite origami. If you consider a rotation by, say, 60 degrees, you know that if you repeat the rotation 6 times, you get back to where you started. On the other hand, if you translate a tessellation by 1 cm to the right, repeated translations will never get back to where you started. If translation by 1 cm is a symmetry, then so is translation by 2 cm, 3 cm, 4 cm, and so on. Also, translation by -1 cm, -2 cm, -3 cm, and so on. This implies that the symmetry group is of infinite order, which makes things rather difficult.
Tessellation symmetry groups
Earlier in this series, one question I never bothered to ask is, “How many distinct finite symmetry groups are possible”. There are quite a lot! Remember that complicated diagram of cubic symmetry subgroups? That’s just a small taste. The true answer: infinity. See, you need to count 4-fold rotational symmetry, 5-fold rotational symmetry, 6-fold rotational symmetry, 7-fold rotational symmetry, and so on.
{kind=link}
When it comes to the symmetry groups for tessellations, the possibilities are rather more limited. You don’t need to count e.g. 7-fold rotational symmetry, because there simply isn’t a way to make a tessellation that has 7-fold rotational symmetry and translational symmetry. As a result, there are a finite number of distinct symmetry groups.
How many? I’m not sure, but it’s more than 17. 17 is the number of “wallpaper groups“, the symmetry groups of repeating 2D patterns. (There are also 7 “frieze groups“, which make patterns that repeat only along 1 direction, but I don’t count those.)
Why do I think there’s more than 17? Because here is a tessellation that has a symmetry group that is different from any of the wallpaper groups.

The front and back of the Reverse Square Tessellation, a model of my own design
If you take this model, translate it by a little bit, and then reflect front to back, then you get the same pattern again. In the wallpaper groups, there’s no notion of reflecting front to back, thus this is not a wallpaper group. So the number of distinct origami tessellation symmetry groups is somewhat more than 17. If I ever figure out how many there are, I’ll write an appendix.
A conclusion?
This is probably the last post I’ll write in this series (except for that appendix). I know it was a bit rough to follow at times, but that’s what happens when I’m trying to figure things out for myself as I go. If I ever revisit these topics in the future, I’m confident I will be able to explain them more clearly.
A few key points to close out:
- Symmetry is basic enough that they teach it in grade school, but deep enough that they teach it again in college math courses.
- Art doesn’t need symmetry to have aesthetic value, but learning about symmetry can be a source of inspiration.
- Math has aesthetic value.
Thanks for reading.
Thank you for sharing your thoughts, you are right it hasn’t always been easy reading, but stretching in good ways.
So I found out how many symmetry groups there are for origami tessellations. They’re called layer groups, and there are 80 of them.