This is the third part of a series about symmetry in origami. Previously, I established the idea of a symmetry group, a set of transformations that leaves a model’s shape unchanged. Next, I talked about how the colors of a model define a subgroup. In this post, I will explain the concept of a normal subgroup.
First illustration: The Umulius
We begin with a case study of one of my favorite models, Thoki Yenn’s Umulius. “Umulius” is a Danish insult meaning “impossible person”.

Ignoring the colors, the Umulius nearly has cubic symmetry. Here I have a series of diagrams “cleaning up” the details to make the underlying cubic symmetry clear.
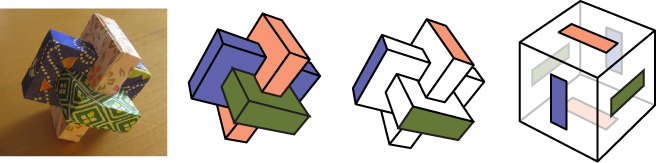
However, the Umulius’s symmetry group isn’t quite as large as the cube. There is at least one transformation that leaves the cube unchanged, but which changes the Umulius. The specific transformation I have in mind is a 90 degree rotation.
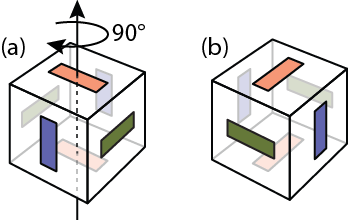
The Umulius symmetry group is a subgroup of the cubic symmetry group. The full cubic symmetry group has 48 transformations, but the Umulius symmetry group has only 24. But… there’s something special about the Umulius symmetry group.
In the figure above, there are two panels labeled (a) and (b). We can think of these as two distinct Umuliuses (even though they’re just rotated from one another), which we’ll call Umulius (a) and Umulius (b). The fact I want to highlight is that Umulius (a) and Umulius (b) have exactly the same symmetry group.
It will help if I contrast with another group where this does not hold. Consider another object which I’m calling a Dotted Cube.
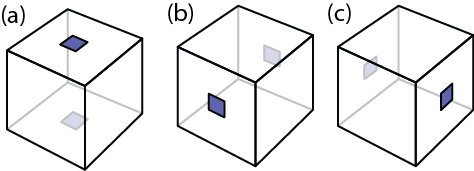
Just like the Umulius, we can consider several distinct dotted cubes. There’s Dotted Cube (a), Dotted Cube (b), and Dotted Cube (c). These different Dotted Cubes are just rotated from one another. However, their symmetry groups are not the same.
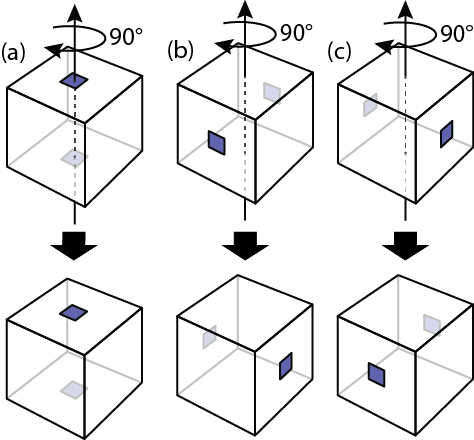
Above, I show the same transformation (a 90 degree rotation) applied to (a), (b) and (c). Only Dotted Cube (a) is left unchanged by the transformation, while both (b) and (c) are changed. This means that the transformation is in (a)’s symmetry group, but not (b)’s or (c)’s. This demonstrates that the symmetry groups of (a), (b), and (c) are distinct from each other.
In group theory, we say that the Umulius symmetry group is a normal subgroup of the cubic symmetry group. The Dotted Cube symmetry group is a subgroup, but not a normal subgroup.
Second illustration: Conjugacy Classes
If that wasn’t sufficient illustration of what a normal subgroup is, here is a second illustration. If we consider the 48 transformations of a cube, we can say that some of those transformations are conjugates of one another. Two transformations are conjugates of each other, if there is some transformation in the cubic symmetry group that connects them together. This is best illustrated by examples.
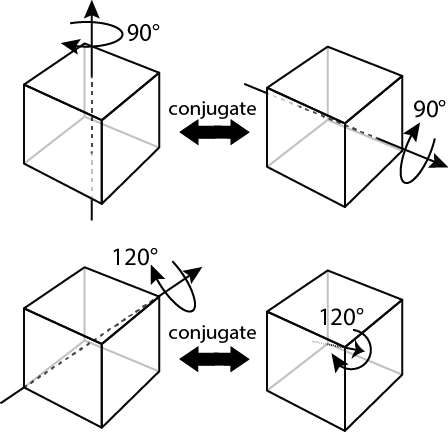
In the top row, we have two transformations: 90 degree rotation around the vertical axis, and 90 degree rotation around a horizontal axis. These two transformations are distinct, but they are conjugates of one another. In the bottom row, we have two more transformations: 120 degree rotation around an axis that goes through two vertices, and 120 degree rotation around an axis going through two different vertices. These two transformations are conjugates of one another.
We can partition the 48 transformations into conjugacy classes. A conjugacy class is simply a set of transformations that are all conjugates of each other. Excluding the 24 reflections, we have the following conjugacy classes:
- 90 degree rotation around an axis that goes through the center of two opposite faces. (6 transformations)
- 180 degree rotation around an axis that goes through the center of two opposite faces. (3 transformations)
- 120 degree rotation around an axis that goes through two opposite vertices. (8 transformations)
- 180 degree rotation around an axis that goes through the center of two opposite edges. (6 transformations)
- The identity transformation. (1 transformation)
A subgroup only contains some of those transformations and not others. In principle, a subgroup might contain only part of a conjugacy class. For instance, it might contain 2 of the transformations in the first conjugacy class, and not the other 4 transformations. What’s special about a normal subgroup, is that it does not include any partial conjugacy class. It either includes the whole conjugacy class, or none of it. For example, the Umulius symmetry group contains the conjugacy classes 2, 3, and 5, and does not include any of the transformations in the conjugacy classes 1 and 4. (It also includes some additional reflection conjugacy classes which I omitted.)
A normal subgroup is essentially a subgroup that is only conjugate to itself.
Why do normal subgroups matter?
In the world of origami, it’s just a matter of aesthetics. Sometimes, normal subgroups look pretty, and that’s all there is to it. Of course, there’s no requirement to use only normal subgroups. Sometimes it’s also fun to deliberately break symmetry.
In the world of mathematics, normal subgroups are very important. If we have a group G, and a normal subgroup F, then it is possible to define a quotient group, which we label G / F. So in a way, it’s like G is “divisible” by F.
There’s also the concept of a simple group, which is analogous to prime numbers. A prime number is divisible only by itself and by 1. A simple group has only two normal subgroups: itself, and the identity group. Simple groups are the atoms of group theory; they cannot be broken down into smaller parts.
Something that is really neat, is that mathematicians have classified all finite simple groups! There are no simple groups unaccounted for. Mathematicians have a proof! The proof is spread across hundreds of scholarly articles, and I can’t even begin to understand it! I feel like this is an enormous human accomplishment that deserves more appreciation.
I’m sorry to say that the icosahedral rotation group is a simple group, which means there are no Umulius-analogues for the icosahedron.
I wanted to say I find this discussion really interesting… it’s a bit out of my league but fortunately it’s written down here and I can come back and read it several times!
Also the Umulius is a lovely model. I immediately sat down and did one in dollar bills and it turned out really cool. So I find these posts inspirational in that I’m learning to fold models I would not otherwise consider, as well as coming across new ideas. Thank you!
@kestrel,
I do hope that the series is understandable to people without a lot of math training, but trying to explain normal subgroups is fairly ambitious. I certainly had trouble understanding them when I took a course on group theory way back in 2009. If there’s any part that you really want to understand, don’t hesitate to ask. 🙂
I do love the Umulius, not just for its symmetry, but because the design can be adapted to other shapes. I designed the Knotted Toroid that way.